
Любую совокупность действительных чисел (x1; x2; …;xn) будем называть точкой, а сами числа — координатами этой точки.
Будем обозначать точки большими латинскими буквами, а координаты записывать в круглых скобках X (x1; x2; …;xn).
Точку (0; 0; …;0) будем называть началом координат и обозначать O.
Пусть A(a1; a2; …; an) и B(b1; b2; …; bn) – две точки. Назовём вектором ![]() величину, определяемую следующим образом:
величину, определяемую следующим образом: ![]() Точка A(a1; a2; …; an) называется началом вектора, а точка B(b1; b2; …; bn) – концом.
Точка A(a1; a2; …; an) называется началом вектора, а точка B(b1; b2; …; bn) – концом.
Векторы также будем обозначать с помощью двух больших или одной маленькой латинских букв со стрелкой сверху, указывая их координаты в фигурных скобках: ![]()
Два вектора
![]()
с одним и тем же числом координат называются равными в том и только в том случае, если равны соответствующие координаты a1 = b1; a2 = b2; …; an = bn.
Длиной (или модулем) вектора назовём величину ![]()
Вектор ![]() называется нулевым вектором.
называется нулевым вектором.
Вектор ![]() называется противоположным вектором по отношению к вектору
называется противоположным вектором по отношению к вектору
![]()
и обозначается так: ![]()
Произведением вектора
![]()
на действительное число λ называется вектором
![]()
Векторы
![]()
удовлетворяющие соотношению
![]()
называются коллинеарными.
Условие коллинеарности двух векторов в векторной форме:
![]()
Условие коллинеарности двух векторов
![]()
в координатной форме таково:
![]()
Свойства операции умножения вектора на число
-
 здесь k и λ — действительные числа.
здесь k и λ — действительные числа.
-

Назовём ортами векторы, имеющие только одну координату, равную единице, при этом остальные координаты равны нулю:
![]()
![]()
![]()
![]()
Заметим, что длина орта равна единице: ![]()
Назовём двумерной декартовой прямоугольной системой координат (декартовой прямоугольной системой на плоскости) такую, которая определяется двумя ортами ![]() и
и ![]() , исходящими из единого начала O(0; 0), называемого началом координат. Множество концов векторов
, исходящими из единого начала O(0; 0), называемого началом координат. Множество концов векторов ![]() , где
, где ![]() , коллинеарных орту
, коллинеарных орту ![]() , называется осью абсцисс. Множество концов векторов
, называется осью абсцисс. Множество концов векторов ![]() , где
, где ![]() , коллинеарны орту
, коллинеарны орту ![]() , называется осью ординат.
, называется осью ординат.
Назовём трёхмерной декартовой прямоугольной системой координат (декартовой прямоугольной системой координат в пространстве) такую, которая определяется тремя ортами ![]() ,
, ![]() и
и ![]() , исходящими из единого начала O(0; 0; 0), которое называется началом координат. Множество концов векторов
, исходящими из единого начала O(0; 0; 0), которое называется началом координат. Множество концов векторов ![]() , где
, где ![]() , коллинеарных орту
, коллинеарных орту ![]() , называется осью абсцисс. Множество концов векторов
, называется осью абсцисс. Множество концов векторов ![]() , где
, где ![]() , коллинеарных орту
, коллинеарных орту ![]() , называется осью ординат. Множество концов векторов
, называется осью ординат. Множество концов векторов ![]() , где
, где ![]() , коллинеарных орту
, коллинеарных орту ![]() , называется осью аппликат.
, называется осью аппликат.
Суммой двух векторов
![]()
с одним и тем числом координат называется вектор ![]() , координаты которого удовлетворяют условиям ci = ai + bi, i = 1, 2, …, n.
, координаты которого удовлетворяют условиям ci = ai + bi, i = 1, 2, …, n.
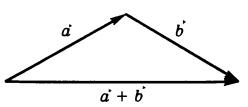
В двумерной и трёхмерной декартовых прямоугольных системах координат сложение векторов по указанному способу соответствует сложению по правилу треугольника или (что то же самое) по правилу параллелограмма.
Правило треугольника. Суммой двух векторов ![]() и
и ![]() называется вектор, идущий из начала вектора
называется вектор, идущий из начала вектора ![]() в конец вектора
в конец вектора ![]() при условии, что вектор
при условии, что вектор ![]() приложен к концу вектора
приложен к концу вектора ![]() .
.
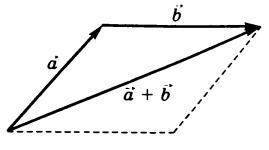
Правило параллелограмма. Если неколлинеарные векторы ![]() и
и ![]() приложены к общему началу и на них построен параллелограмм, то сумма
приложены к общему началу и на них построен параллелограмм, то сумма ![]() +
+ ![]() (или
(или ![]() +
+ ![]() ) этих векторов представляет собой диагональ указанного параллелограмма, идущую из общего начала.
) этих векторов представляет собой диагональ указанного параллелограмма, идущую из общего начала.
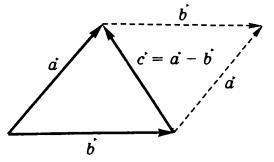
Разностью векторов
![]()
с одним и тем же числом координат называют вектор
![]()
В двумерной и трёхмерной декартовых системах координат разность векторов находится по правилу треугольника.
Свойства операции нахождения суммы векторов:
Векторы, в двумерной и трёхмерной прямоугольных декартовых системах координат могут быть соответственно представлены с помощью разложения по ортам:
![]()
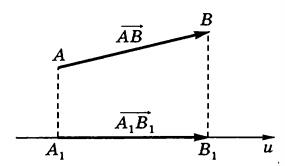
Проекцией вектора ![]() на ось u называется величина направленного отрезка
на ось u называется величина направленного отрезка ![]() оси u (A1 и B1 — основания перпендикуляров на ось и из точек A и B соответственно).
оси u (A1 и B1 — основания перпендикуляров на ось и из точек A и B соответственно).
Координаты векторов в двумерной и трёхмерной декартовых прямоугольных системах координат равны проекциям эти векторов на соответствующие оси координат.
Точка A(x; y) изображается в двумерной декартовой прямоугольной системе координат как конец вектора ![]() , если начало этого вектора фиксировано в начале координат.
, если начало этого вектора фиксировано в начале координат.
Примеры решения заданий по координатам точки и вектора
Даны точки A(1, 2, -2) B(3, 1, 4). Найти координаты векторов ![]() и
и ![]() . Найти
. Найти ![]() и
и ![]() .
.
Р е ш е н и е. Координаты векторов ![]() и
и ![]() находятся как разности соответствующих координат конца и начала векторов, т. е. разность соответствующих координат точек A и B.
находятся как разности соответствующих координат конца и начала векторов, т. е. разность соответствующих координат точек A и B.
![]()
Имеем таким образом,
![]() , т. е.
, т. е. ![]() .
.
Очевидно, что координаты вектора ![]() противоположны по знаку координатам вектора
противоположны по знаку координатам вектора ![]() , т. е.
, т. е.
![]() и
и ![]() .
.
Длина или модуль вектора ![]() находятся по формуле
находятся по формуле
![]()
Подставляя координаты вектора ![]() в формулу, получим:
в формулу, получим:
![]()
Очевидно, что
![]()